
 �ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��


�P(gu��n)�I�~�����I(y��)�C(j��)���ˡ��f(xi��)���C(j��)���ˡ����ܙC(j��)����
 ���I(y��)�C(j��)����
���I(y��)�C(j��)����
���I(y��)�C(j��)���˳�Ҋ�Ŀ��Ʒ�ʽ����Щ��
�C(j��)���ˣ������(sh��)��r��߀��̎�ڱ��^�ӵĿ��g��λ�����A�Σ��]��̫�����ܺ��������x���ܻ�߀�к��L��·Ҫ�ߡ�����҇��ęC(j��)���ˌ��ҏđ�(y��ng)�íh(hu��n)�����l(f��)�����C(j��)���˷֞�ɴ�������I(y��)�C(j��)���˺����ܙC(j��)���ˡ�
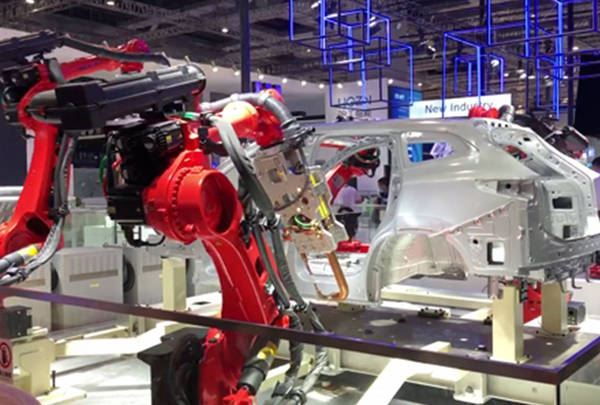
Ŀǰ�Ј��ϑ�(y��ng)����V���ęC(j��)�����ǹ��I(y��)�C(j��)���ˣ�Ҳ������졢�����ƵęC(j��)���ˡ����I(y��)�C(j��)���˾��ж�N���Ʒ�������ô�����I(y��)�C(j��)���˳�Ҋ�Ŀ��Ʒ�ʽ����Щ��
1.�c(di��n)����ģʽ(PTP)
�c(di��n)λ�ÿ��ƏV����(y��ng)���ڙC(j��)�һ�w���͙C(j��)���˹��I(y��)�I(l��ng)��(sh��)�ؙC(j��)����ۙ���݆�������I(y��)�C(j��)����ָ��܉�E���ƺͲ��ЙC(j��)����·����ۙϵ�y(t��ng)�ڙC(j��)е����I(y��)�еĵ��͑�(y��ng)�á�
�ڿ����^���У�Ҫ�I(y��)�C(j��)�����܉��������c(di��n)֮�g���١���(zh��n)�_���Ƅ�(d��ng)�����Ҍ�(du��)�ڵ��_(d��)Ŀ��(bi��o)�c(di��n)���Ƅ�(d��ng)܉�E�]���κ�Ҏ(gu��)����
��λ���Ⱥ��Ƅ�(d��ng)����r(sh��)�g��ԓ����ģʽ�ăɂ�(g��)��Ҫ���g(sh��)ָ��(bi��o)���@�N���Ʒ������ڌ�(sh��)�F(xi��n)�Ͷ�λ���ȣ�ͨ�������b�d��ж�d�Ͱ��\(y��n)�c(di��n)�����·���ϵIJ��벿����(y��ng)���ֽK�ˈ�(zh��)������Ŀ��(bi��o)�c(di��n)�Ĝ�(zh��n)�_λ�á�ԓ��������(du��)���Σ������y�_(d��)��2~3um�Ķ�λ���ȡ�
�c(di��n)����ϵ�y(t��ng)��(sh��)�H����λ���ŷ�ϵ�y(t��ng)��������Y(ji��)��(g��u)�ͽM�ɻ�����ͬ�������Ə�(f��)�s�����(c��)���c(di��n)��ͬ����ͬ;����(j��)�������ɷ֞��]�h(hu��n)ϵ�y(t��ng)�����]�h(hu��n)ϵ�y(t��ng)���_�h(hu��n)ϵ�y(t��ng)��
2.�B�m(x��)܉�E����ģʽ(CP)
���c(di��n)λ�õĿ����£�PTP���_ʼ�ͽY(ji��)���ٶȞ�0���ڴ����g����ʹ�ø��N�ٶ�Ҏ(gu��)��������
CP�������B�m(x��)���ƹ��I(y��)�C(j��)���˽K�ˈ�(zh��)�����ڹ������g�е�λ�á����g�c(di��n)���ٶȲ����㡣��������Ƅ�(d��ng)��ÿ��(g��)�c(di��n)���ٶ�ͨ�^��ǰ���ٶȫ@�á�һ����f���B�m(x��)܉�E������Ҫ�����ٶ�ǰհ������ǰ�M(j��n)�ٶ����ơ��D(zhu��n)���ٶ����ơ���ۙ�ٶ����ơ�����ٶ����ƺ�݆���`���ٶ����ơ�
���I(y��)�C(j��)���˵��P(gu��n)��(ji��)���B�m(x��)���B�m(x��)�ģ�ͨ�^ͬ���\(y��n)��(d��ng)���K�ˈ�(zh��)���������γ��B�m(x��)��܉�E���@�N����ģʽ����Ҫ���g(sh��)ָ��(bi��o)�ǹ��I(y��)�C(j��)���˽K�ˈ�(zh��)����λ�õĸ�ۙ���Ⱥͷ�(w��n)���ԣ�ͨ���ǻ����͇��ᡣԓ���Ʒ������ڙC(j��)����ȥë�̺͙z�y(c��)��
3.��(����)���Ʒ���
�S���C(j��)���ˑ�(y��ng)��߅��IJ����U(ku��)�H��ҕ�X�x���џo���M���(f��)�s��(sh��)�H��(y��ng)�õ����˕r(sh��)�����������/�����Կ���ݔ�������߱�������������������]�h(hu��n)������
��(d��ng)ץȡ�ͷ������w�r(sh��)���b�������M(j��n)�У����˾��_��λ�⣬߀��Ҫʹ���m��(d��ng)?sh��)�����Ť�أ�Ȼ����ʹ�?Ť��)�ŷ�������ԭ���cλ���ŷ�����ԭ��������ͬ����ݔ��ͷ�������λ����̖(h��o)��������(Ť��)��̖(h��o)����˱����ϵ�y(t��ng)��ʹ�Ï�(qi��ng)���(Ť��)���������Еr(sh��)߀ʹ���T��ӽ������m��(y��ng)���ƺͻ���(d��ng)�ȸМy(c��)���ܡ�
4.���ܿ���ģʽ
�C(j��)�������ܿ�����ͨ�^������(��z��C(j��))����������Ϣ̎����������Ϣ���������ܿ��ƛQ�ߵĿ���ģʽ���D��������������l(f��)����������������(d��o)����z�����Ԫ���͚��(d��ng)Ԫ�����г��_�P(gu��n)�������C(j��)�Ԫ��)�@ȡ�܇��h(hu��n)����֪�R(sh��)��������(j��)�Լ��ă�(n��i)��֪�R(sh��)����������(y��ng)�ěQ�ߡ�
���ܿ��Ƽ��g(sh��)�İl(f��)չ��ه���˹���(j��ng)�W(w��ng)�j(lu��)���z���㷨���z���㷨���˹����܌���ϵ�y(t��ng)�Ŀ��ٰl(f��)չ������������ܿ��Ƽ��g(sh��)ȡ�����@���M(j��n)չ��ģ��������Փ���˹���(j��ng)�W(w��ng)�j(lu��)��Փ���伯�ɘO�������˙C(j��)���˵��ٶȺ;��ȡ���Ҫ���ڶ��P(gu��n)��(ji��)�C(j��)���˸�ۙ���ơ�����C(j��)���˿��ơ����ݙC(j��)���˿��ơ���C(j��)���˿��Ƶȡ�
�C(j��)�������ܿ��ƿɷ֞飺ģ�����ơ����m��(y��ng)���ơ��(y��u)���ơ���(j��ng)�W(w��ng)�j(lu��)���ơ�ģ����(j��ng)�W(w��ng)�j(lu��)���ƺ͌��ҿ��Ƶȡ�
�f(xi��)���C(j��)�����x������Щ��Ҫ���g(sh��)����(sh��)��
�p�ͅf(xi��)���C(j��)������һ�N���I(y��)�C(j��)���ˣ�����ƽ���С���|�����Ñ����棬�Ñ�����ͨ�^ָʾ��Ļ�ϵĄ�(d��ng)�������ƙC(j��)е�ۣ��c���y(t��ng)�ęC(j��)������ȣ��f(xi��)���C(j��)���˵��������p.�߶��`��.�����Ƅ�(d��ng)���������¾��̽�Q���΄�(w��)���Ɏ�����I(y��)�{(di��o)����(sh��)�F(xi��n)�����M(j��n)��С�����ӹ����a(ch��n)���Ķ���(y��ng)��(du��)�������a(ch��n)������(zh��n)��
��ô���f(xi��)���C(j��)�����x������Щ��Ҫ���g(sh��)����(sh��)�أ�����һ����������
1.���d��
��Ч�d���ǙC(j��)���˿��Ԕy�����������f(xi��)���C(j��)���˵�ؓ(f��)�dһ���3-20kg����֮�g�����ЙC(j��)���˶���һ��(g��)Ҏ(gu��)������Ч�d�ɣ��������K�ˈ�(zh��)����(��A��)���o�����ߵ��������@��ζ���C(j��)���˿��Ԕy���Č�(sh��)�H��Ч�d�ɱ�횏����(bi��o)�Q����Ч�d���Мpȥ�K�ˈ�(zh��)����(��A��)�������������(du��)�C(j��)���˵đ�(y��ng)���M(j��n)����������������]��(sh��)�H��(y��ng)��Ҫ��(����ٶ�)�����텢��(sh��)(��Ħ��ϵ��(sh��))���t�б�Ҫ�m��(d��ng)���͙C(j��)���˵������Ч�d�ɡ��cһ���\(y��n)��(d��ng)����ϵ�y(t��ng)һ�ӣ��������ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)����(���ٶ�)������ؓ(f��)�d�|(zh��)����
2.����
�C(j��)�������w��������ζ�����Ƿ���Ժ������Ƅ�(d��ng)��׃����λ�ã��������Ƿ���Ҫ��܇���܇AGV��܇������@�(xi��ng)��������һЩ܇�g���C(j��)������Ҫ������Q��������ɸ��N���a(ch��n)�΄�(w��)������C(j��)����̫�أ��t��Ҫ��������������r(sh��)�g����əC(j��)���˵�λ�ƺ̶���
3.�؏�(f��)��
�ܶ��r(sh��)���˂���(hu��)���C(j��)���˄�(d��ng)���Ĝ�(zh��n)�_�Ի��(zh��n)�_�ԡ����څf(xi��)���C(j��)���˵�������@��(g��)ָ��(bi��o)��(sh��)�H�ϛ]��ʲô���x����(sh��)�ϣ��҂���Ҫ֪�������؏�(f��)�ԡ����څf(xi��)���C(j��)����ͨ��ͨ�^�ք�(d��ng)ԇ�(y��n)�̌W(xu��)/�ք�(d��ng)ָ��(d��o)�M(j��n)�о��̺�Ӌ(j��)������˙C(j��)���˿��ԏ�(f��)�ƺ͈�(zh��)����ȫ��ͬ���\(y��n)��(d��ng)�����Ժ����ȶ�λx.y.Z����(bi��o)�c(di��n)���������Ѓr(ji��)ֵ��Ŀǰ�������(sh��)�f(xi��)���C(j��)���˵�����؏�(f��)ֵ������Ҏ(gu��)����С���ˣ���(d��ng)�҂��y(c��)ԇ��ʹ�ÙC(j��)���˕r(sh��)���҂�ͨ����(hu��)�õ��������Ę�(bi��o)�Qֵ��С���؏�(f��)�ԡ�
4.��ȫ��
������Ҫ�c�˙C(j��)���ɣ���ȫ��(du��)�څf(xi��)���C(j��)�����Ȟ���Ҫ���mȻ��ȫ��һ��(g��)�dz���(f��)�s�Ć��}�����S���C(j��)������������Ȼ��(hu��)����(j��)����(y��ng)�İ�ȫ��(j��)�eУ��(zh��n)�����ęC(j��)���ˮa(ch��n)Ʒ�������еĴ����(sh��)�ˌ��@�õ������C�l(f��)�İ�ȫ�J(r��n)�C��Ŀǰ�����(y��n)��ęC(j��)����ȫ����������t?V��ԓ�M������(zh��n)���S���C(j��)���˵İ�ȫ�J(r��n)�C��ͬ�r(sh��)���C(j��)���˵�“��ȫ”�J(r��n)�C��(hu��)���S�ͬ��׃��(sh��)��Ψһ��Ҫ��ጵ��ǣ��C(j��)���˵��J(r��n)�C�ǰ�ȫ�ģ��@������ζ���C(j��)���˵đ�(y��ng)���ǰ�ȫ�ġ�
5.������
��(j��ng)����Ҫ�c�˺���.�f(xi��)���C(j��)���˽�(j��ng)���ГQ��ͬ�IJ����΄�(w��)���������õ�������ֱ�ӛQ�����O(sh��)�䑪(y��ng)�õ����a(ch��n)���\(y��n)��Ч�ʡ����@��(g��)ָ��(bi��o)��(sh��)�H�Ϻ��y��������?y��n)����dz���ه���˂��IJ�����ʹ���?x��)�T��ͬ�ӵĽ����ʹ�÷�����(du��)ijЩ�ˁ��f�����ף�����(du��)�����ˁ��f���y����ˣ��@һָ��(bi��o)�������^�ġ�
6.��չ
�C(j��)���˵ı�չ��ָ�C(j��)�������������_(d��)�������(�h(yu��n))���x���@�N���xͨ���ǏęC(j��)���˵ĵײ��y(c��)���ġ�ͬ�r(sh��)�����S������Ԝy(c��)���C(j��)�����ֱ۵Ŀ�ȡ��ڴ����(sh��)��r�£��҂��x��C(j��)�������������_(d��)���������x���酢����ͨ�����f(xi��)���C(j��)���˵ı��L��������ֱ۵��L�ȡ�
�ļ��g(sh��)Ҏ(gu��)���в��y�����f(xi��)���C(j��)�����c���y(t��ng)���I(y��)�C(j��)���˵�һЩ��Ҫ�^(q��)�e��ͬ�r(sh��)���@Щ��Ҫ�ļ��g(sh��)����(sh��)Ҳ�Q���˅f(xi��)���C(j��)���˺��I(y��)�C(j��)���˵IJ�ͬ��(y��ng)���I(l��ng)��
���I(y��)�C(j��)��������Щϵ�y(t��ng)�M�ɣ�������ʲô���ã�
�C(j��)������һ��(g��)�����S���g�����^�����ɶȵģ����܌�(sh��)�F(xi��n)�T���M�˄�(d��ng)�����ܵęC(j��)���������I(y��)�C(j��)���˄t���ڹ��I(y��)���a(ch��n)�ϑ�(y��ng)�õęC(j��)���ˡ��������c(di��n)�ǣ��ɾ��̡��M�˻���ͨ���ԡ��C(j��)�һ�w������
���I(y��)�C(j��)��������Щϵ�y(t��ng)�M�ɣ�
1�����w
���w�C(j��)е���C(j��)���͌�(sh��)�ЙC(j��)��(g��u)��������ۡ�С�ۡ����ֲ�����(g��u)�ɵĶ����ɶȵęC(j��)еϵ�y(t��ng)���еęC(j��)�����������ߙC(j��)��(g��u)�����I(y��)�C(j��)������6��(g��)���ɶ�����������ͨ����1��3��(g��)���(d��ng)���ɶȡ�
2���(q��)��(d��ng)ϵ�y(t��ng)
ʹ�C(j��)�����\(y��n)�������Ă���(d��ng)�b�á�����(d��ng)��Դ�֞�Һ�������(d��ng)��늄�(d��ng)���������(j��)����Ҳ�����@���N�����M�ϲ���(f��)��ʽ���(q��)��(d��ng)ϵ�y(t��ng)������ͨ�^ͬ������݆ϵ���X݆�șC(j��)е����(d��ng)�C(j��)��(g��u)���g���(q��)��(d��ng)���(q��)��(d��ng)ϵ�y(t��ng)�Є�(d��ng)���b�ú͂���(d��ng)�C(j��)��(g��u)�����Ԍ�(sh��)�ЙC(j��)��(g��u)�l(f��)������(y��ng)�Ą�(d��ng)�����@������(q��)��(d��ng)ϵ�y(t��ng)�ĸ������c(di��n)���F(xi��n)����������늄�(d��ng)�(q��)��(d��ng)ϵ�y(t��ng)��
3������ϵ�y(t��ng)
����(j��)�C(j��)���˵����I(y��)ָ������Լ��Ă���������������̖(h��o)֧��C(j��)���˵Ĉ�(zh��)�ЙC(j��)��(g��u)ȥ��� Ҏ(gu��)�����\(y��n)��(d��ng)���ܡ�
���ԃr(ji��)�ȵ�̎������C(j��)���˿������������µ��_չ�C(j��)��(hu��)��ʹ�_�ٵͱ��X���߹��ܵęC(j��)���˿������ɞ���ܡ�����ʹϵ�y(t��ng)���г�����\(y��n)���c�惦(ch��)�������F(xi��n)�ڙC(j��)���˿�������Ӽ{�^��(qi��ng)��ARMϵ�С�DSPϵ�С�POWERPCϵ�С�Intelϵ�е�оƬ��(g��u)�ɡ�
4����֪ϵ�y(t��ng)
�Ƀ�(n��i)��������ģ�K���ⲿ������ģ�K�M�ɣ��@ȡ��(n��i)�����ⲿ�h(hu��n)����B(t��i)����Ϣ��
��(n��i)�����������Á�z�y(c��)�C(j��)���˱�����B(t��i)(���ֱ��g�ĽǶ�)�Ă�����������z�y(c��)λ�úͽǶȵĂ����������w�У�λ�Â�������λ�Â��������ǶȂ������ȡ�
�ⲿ���������Á�z�y(c��)�C(j��)������̎�h(hu��n)��(��z�y(c��)���w�����x���w�ľ��x)����r(��z�y(c��)ץȡ�����w�Ƿ���)�Ă����������w�о��x��������ҕ�X�����������X�������ȡ�
���܂���ϵ�y(t��ng)��ʹ������˙C(j��)���˵ęC(j��)��(d��ng)�ԣ���(sh��)���Ժ����ܻ��Ę�(bi��o)��(zh��n)����ĸ�֪ϵ�y(t��ng)��(du��)�ⲿ������Ϣ�ǙC(j��)�����`�ɵģ�Ȼ������(du��)��һЩ���S����Ϣ�����������˵�ϵ�y(t��ng)������Ч��
5��ĩ�ˈ�(zh��)����
ĩ�ˈ�(zh��)�����B���ڙC(j��)е�����һ��(g��)�P(gu��n)��(ji��)�ϵIJ�������һ���Á�ץȡ���w���c�����C(j��)��(g��u)�B�Ӳ���(zh��)����Ҫ���΄�(w��)��
���Ͼ���С�������Ĺ��I(y��)�C(j��)���˳�Ҋ�Ŀ��Ʒ�ʽ����Щ���f(xi��)���C(j��)�����x������Щ��Ҫ���g(sh��)����(sh��)�����I(y��)�C(j��)��������Щϵ�y(t��ng)�M�ɣ�������ʲô���ã��gӭ�a(b��)������~

�j(lu��)����")

����")
�j(lu��)110")