在線客服
在線客服
 企業(yè)微信
企業(yè)微信






 [VIP第3年] 指數:1
[VIP第3年] 指數:1
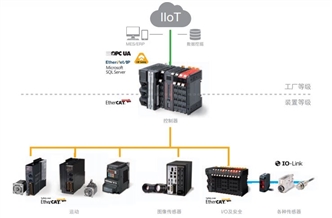
近年來,制造業(yè)一直致力于減少設備停機,提高產能利用率,以追求生產效率。為實現這一目標,需要用符合安全標準的 設備開展生產,保護作業(yè)人員,防止其陷入危險之中。搭載運動安全功能的1S系列伺服,可實現人員、設備與產品的全方 位安全控制。可防止作業(yè)人員暴露在危險之中,同時還能減少設備停機時間,將產生的廢品控制在***少數量。另外,配線 簡潔,在1S系列理念的**下得到了進一步升級,可兼顧運動控制和安全控制,為提高生產效率做出貢獻。


|
店鋪基本資料信息
|
|||||||||||||||||||||||||
近年來,制造業(yè)一直致力于減少設備停機,提高產能利用率,以追求生產效率。為實現這一目標,需要用符合安全標準的 設備開展生產,保護作業(yè)人員,防止其陷入危險之中。搭載運動安全功能的1S系列伺服,可實現人員、設備與產品的全方 位安全控制。可防止作業(yè)人員暴露在危險之中,同時還能減少設備停機時間,將產生的廢品控制在***少數量。另外,配線 簡潔,在1S系列理念的**下得到了進一步升級,可兼顧運動控制和安全控制,為提高生產效率做出貢獻。


僅需1根電纜即可簡單安裝
• 1條帶IP67連接器的電纜即可應對動力、編碼器、制動器
• 采用插拔式連接器,減少配線工時和維護工時
• 采用可快速牢固連接的無螺釘PUSH-IN連接器

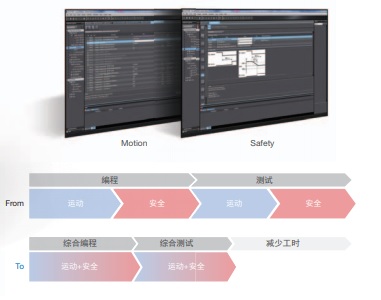
通過綜合編程和測試, 減少工時
• 自動I/F變量定義
• 運動安全功能塊
• 圖形化GUI
• 綜合數據跟蹤
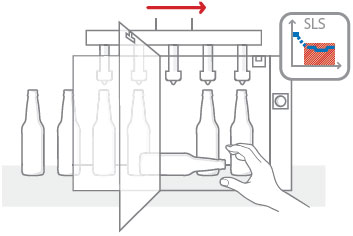
提高設備的產能利用率

• 要取出倒下的工件,需要停止設備,導致生產停止。
• 利用Safety-Limited-Speed功能,可以在安全運行設備的同時,解除異常狀態(tài)。
• 無縫切換安全速度與正常速度。
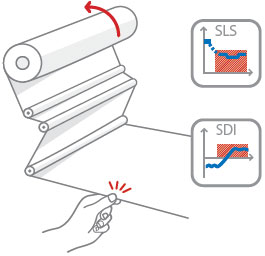
• 更換薄膜時,需要采用點動或低速運行,由作業(yè)人員將薄膜放置到各卷筒上,工序切換復雜,花費時間。
• 利用Safety-Limited-Speed功能,能夠以安全速度轉動卷筒,同時放置薄膜。利用Safe Direction功能,可以監(jiān)視薄膜的進給方向,順暢地實現工序切換。

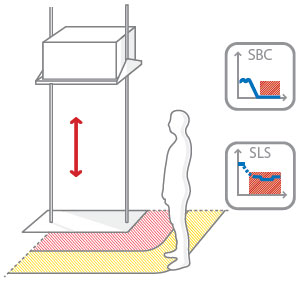
• 在堆高車運行過程中,如果有作業(yè)人員侵入,堆高車會停止。
• 一旦有作業(yè)人員接近,利用Safely-Limited Speed功能, 堆高車可繼續(xù)以安全速度運行,無需停止。
• 如果作業(yè)人員過于靠近,可利用Safe Brake Control功能,安全地停止堆高車。

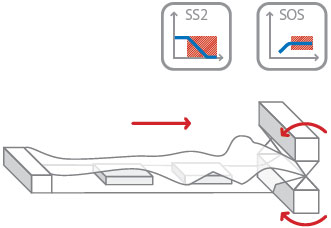
• 如果在包裝過程中發(fā)生緊急停機,多個馬達的同步將被解除,會導致薄膜卡住,產生廢品,而且需要時間重新啟動。
• 即使在包裝過程中發(fā)生緊急停機,馬達也可保持同步, 并減速停止。避免薄膜卡住。

• 將運動、邏輯、安全、驅動、圖像傳感器乃至HMI的支持功能都整合在1個軟件中
• 基于公開的國際程序標準IEC 61131-3(以及JIS B 3503)
• 基于PLCopen的運動控制、安全功能模塊
• 可支持由含有變量的命令句構成梯形語言、ST語言以及功能模塊編程
• 配置有可簡單設定復雜運動控制的CAM編輯器
• 數據庫連接功能塊
• 一種可在機器自動化控制器NJ/NX系列的程序中使用的軟件功能組件庫。 還備有示例程序和HMI畫面示例。
請從歐姆龍公司的Web地址下載后,安裝到Sysmac Studio中使用。
http://www.fa.omron.com.cn

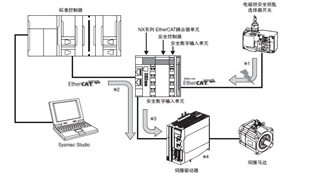
將NX系列安全網絡控制器和NX/NJ系列機器自動化控制器連接后,可同時使用 EtherNet/IP+CIP Safety和EtherCAT+FSoE。
• 將邏輯控制、運動控制整合在1個控制器中
• 控制軸數:2~256軸。 可根據規(guī)模大小選擇CPU單元
• 基于IEC 61131-3(及JIS B 3503)
• 基于PLCopen的運動控制、安全功能模塊
• 具有配置機器人控制功能或數據庫連接功能的機型
• 標準配置EtherCAT及EtherNet/IP端口

• 旋轉馬達用伺服驅動器
• 馬達功率:***大3kW
• 無電池ABS編碼器
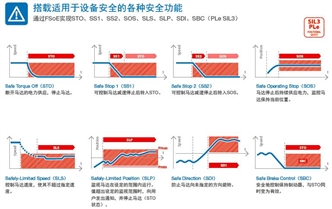
• 高度的安全功能:STO/SS1/SS2/SOS/SLS/ SLP/SDI/SBC
• 1條電纜即可應對動力、編碼器、制動器

• •旋轉馬達用伺服驅動器
• 馬達功率:***大15kW
• 無電池ABS編碼器
• 安全功能:STO
• 旋轉馬達用/直線馬達用伺服驅動器
• 旋轉馬達功率:***大15kW
• 直線馬達:***大推力2100N
• 安全功能:STO功能(僅限安全輸入信號)
• 標配全閉環(huán)控制
Sysmac是歐姆龍株式會社生產的FA設備產品在日本及其他國家的商標或注冊商標。
Windows、SQL Server是美國Microsoft Corporation在美國、日本及其他國家的注冊商標或商標。
EtherCAT®及Safety over EtherCAT®是注冊商標,該注冊商標以及相關知識產權已取得Beckhoff Automation GmbH(德國)的許可。
EtherNet/IPTM、CIP SafetyTM是ODVA的商標。
其他記載的公司名稱及產品名稱等,都是各相應公司的注冊商標或商標。
本產品目錄中使用的產品照片及圖片包含示意圖像,有時可能與實物不同。
所有截屏的使用都已取得微軟公司的許可。
包括按照Shutterstock.com的許可協議使用的圖像。
| 項目 | 規(guī)格 | ||
|---|---|---|---|
| 使用環(huán)境的溫度、濕度 | 0~55℃、 90%RH以下(無結露) | ||
| 保存環(huán)境的溫度、濕度 | -20~+65℃、 90%RH以下(無結露) | ||
| 使用、保存環(huán)境的空氣要求 | 無腐蝕性氣體等 | ||
| 使用高度 | 海拔1000m以下 | ||
| 耐振動 | 10~60Hz、加速度5.88m/s2以下(在共振點不可連續(xù)使用) | ||
| 絕緣電阻 | 電源端子/動力端子與PE之間0.5MΩ以上(DC500V) | ||
| 耐電壓 | 電源端子/動力端子與PE之間AC1500V 1分鐘(50/60Hz) | ||
| 保護構造 | IP20(安裝在保護等級為IP54的柜內) | ||
| 國際標準 | EU指令 | EMC指令 | EN 61800-3 second environment、 C3 category(EN 61000-6-7; Functional Safety) |
| 低電壓指令 | EN61800-5-1 | ||
| 機械指令 | EN ISO 13849-1、 EN61508、 EN62061、 EN61800-5-2 | ||
| UL標準 | UL61800-5-1 | ||
| CSA標準 | CSA C22.2 No.274 | ||
| 韓國電波法(KC) | 適用 | ||
| 澳大利亞標識要求(RCM) | 適用 | ||
| EAC標準 | 適用 | ||
| SEMI標準 | 可用于瞬停基準 (無負荷時) | ||
| 船舶標準 (NK/LR) | 不適用 | ||
| 伺服驅動器型號 (R88D-) | 1SAN02H-ECT | 1SAN04H-ECT | 1SAN08H-ECT | ||
|---|---|---|---|---|---|
| 項目 | 200W | 400W | 750W | ||
| 輸入 | 主回路 | 電源電壓 | |||
| 頻率 | |||||
| 控制回路 | 電源電壓 | ||||
| 消耗電流 *2 | |||||
| 額定電流[Arms] (主回路電源電壓: AC240V時) |
單相 | ||||
| 三相 | |||||
| 輸出 | 額定電流[Arms] | ||||
| ***大電流[Arms] | |||||
| 發(fā)熱量[W] | 主回路 | ||||
| 控制回路 | |||||
| 適用伺服馬達額定輸出[W] | |||||
| 3000r/min馬達 (R88M-) | 無電池20位 ABS |
||||
| 瞬斷保持時間 (主回路電源電壓:AC200V時) | |||||
| 重量[kg] | |||||
| 伺服驅動器型號 (R88D-) | 1SAN10H-ECT | 1SAN15H-ECT | 1SAN20H-ECT | 1SAN30H-ECT | ||
|---|---|---|---|---|---|---|
| 項目 | 1kW | 1.5kW | 2kW | 3kW | ||
| 輸入 | 主回路 | 電源電壓 | AC200~240V (170~252V)*1 |
AC200~240V (170~252V)*1 |
||
| 頻率 | ||||||
| 控制回路 | 電源電壓 | |||||
| 消耗電流 *2 | ||||||
| 額定電流[Arms] (主回路電源電壓: AC240V時) |
單相 | |||||
| 三相 | ||||||
| 輸出 | 額定電流[Arms] | |||||
| ***大電流[Arms] | ||||||
| 發(fā)熱量[W] | 主回路 *3 | |||||
| 控制回路 | ||||||
| 適用伺服馬達額定輸出[W] | ||||||
| 3000r/min馬達 (R88M-) | 無電池20位 ABS |
|||||
| 1500r/min馬達 (R88M-) | 無電池20位 ABS |
|||||
| 瞬斷保持時間 (主回路電源電壓:AC200V時) | ||||||
| 重量[kg] | ||||||
AC400V輸入型AC400V三相電源,請使用實施了中性點接地的電源。
| 伺服驅動器型號 (R88D-) | 1SAN10F-ECT | 1SAN15F-ECT | 1SAN20F-ECT | 1SAN30F-ECT | ||
|---|---|---|---|---|---|---|
| 項目 | 1kW | 1.5kW | 2kW | 3kW | ||
| 輸入 | 主回路 | 電源電壓 | ||||
| 頻率 | ||||||
| 控制回路 | 電源電壓 | |||||
| 消耗電流 *2 | ||||||
| 額定電流[Arms] (主回路電源電壓: AC480V時) |
三相 | |||||
| 輸出 | 額定電流[Arms] | |||||
| ***大電流[Arms] | ||||||
| 發(fā)熱量[W] | 主回路 *3 | |||||
| 控制回路 | ||||||
| 適用伺服馬達額定輸出[W] | ||||||
| 3000r/min馬達 (R88M-) | 無電池20位 ABS |
1AL1K030C |
||||
| 1500r/min馬達 (R88M-) | 無電池20位 ABS |
|||||
| 瞬斷保持時間 (主回路電源電壓:AC400V時) | ||||||
| 重量[kg] | ||||||
| 伺服驅動器型號 | 伺服馬達型號 | 主回路發(fā)熱量[W] | |
|---|---|---|---|
| 功能 | 內容 |
|---|---|
Safe torque off (STO) |
|
Safe stop 1 (SS1) |
|
Safe stop 2 (SS2) |
|
Safe operating stop (SOS) |
|
Safely-limited speed (SLS) |
|
Safely-limited position (SLP) |
|
Safe direction (SDI) |
|
Safe brake control (SBC) |
各安全功能可實現的***高安全等級如下所示。
| 功能 | 可實現的安全等級 | 功能 | 可實現的安全等級 |
|---|---|---|---|
| 設備 | 主要作用 |
|---|---|
| • 安全輸入輸出的監(jiān)視 | |
| • 向標準控制器通知安全輸入輸出的狀態(tài) | |
| • 向伺服驅動器發(fā)出執(zhí)行/中斷安全功能的指令 | |
| • 向伺服驅動器發(fā)出解除安全功能異常的指令 | |
| • 向伺服驅動器發(fā)出伺服ON/OFF或解除異常的指令 • 想伺服驅動器發(fā)出位置、速度、扭矩相關的指令 |
|
| • 根據標準控制器發(fā)出的指令,控制伺服ON/OFF或解除異常 | |
| • 根據標準控制器發(fā)出的指令,控制馬達 | |
| • 根據安全控制器發(fā)出的指令,執(zhí)行/中斷安全功能 | |
| • 根據安全控制器發(fā)出的指令,解除安全功能的異常 | |
| • 發(fā)生異常時,停止馬達 |
下面以使用SLS功能時為例,介紹控制的流程。
| 安全系統(tǒng)構成設備 | 經典型號 |
|---|---|
| 項目 | 規(guī)格 |
|---|---|
| 通信標準 | IEC 61158 Type12、 IEC 61800-7 CiA 402驅動器描述文件 |
| 物理層 | 100BASE-TX(IEEE802.3) |
| 連接器 | RJ452(有屏蔽作用) ECAT IN:EtherCAT輸入 ECAT OUT:EtherCAT輸出 |
| 通信介質 | 推薦使用Ethernet5類(100BASE-TX)以上的雙絞線(與鋁帶組合的雙重屏蔽) |
| 通信距離 | 節(jié)點間距100m以內 |
| 過程數據 | 固定PDO映像 (Fixed PDO mapping) 可變PDO映像 (Variable PDO mapping) |
| 郵箱 (CoE) | 緊急提示信息、 SDO請求、 SDO響應、 SDO信息 |
| 同步模式與通信周期 | DC Mode(Synchronous with Sync0 Event) 通信周期:125μs、 250μs、 500μs、 750μs、 1~10ms(0.25ms間隔) Free Run Mode |
| LED顯示 | ECAT-L/A IN( ECAT-L/A OUT( ECAT-RUN×1 ECAT-ERR×1 |
| CiA402驅動器描述文件 | • Cyclic synchronous position mode(循環(huán)同步位置模式) • Cyclic synchronous velocity mode(循環(huán)同步速度模式) • Cyclic synchronous torque mode(循環(huán)同步扭矩模式) • Profile position mode(描述文件位置模式) • Profile velocity mode(描述文件速度模式) • Homing mode(原點回歸模式) • Touch probe function(外部鎖定功能) • Torque limit function(扭矩限制功能) |
| 單元版本 | Sysmac Studio的對應版本 |
|---|---|
| 項目 | 規(guī)格 | ||
|---|---|---|---|
| 使用環(huán)境的溫度、濕度 | 0~40℃ 20~90%RH(無結露) |
||
| 保存環(huán)境的溫度、濕度 | -20~+65℃ 20~90%RH(無結露) |
||
| 使用、保存環(huán)境的空氣要求 | 無腐蝕性氣體等 | ||
| 耐振動 * | 加速度49m/s2 馬達停止時24.5m/s2以下X、 Y、 Z方向 |
||
| 耐沖擊 | 加速度98m/s2以下X、 Y、 Z方向3次 | ||
| 絕緣電阻 | 動力端子與FG之間10MΩ以上(DC500V兆歐表) | ||
| 耐電壓 | 動力端子與FG之間AC1500V 1分鐘 (電壓200V) 動力端子與FG之間AC1800V 1分鐘 (電壓400V) 制動端子與FG之間AC1000V 1分鐘 | ||
| 絕緣等級 | F類 | ||
| 保護構造 | IP67(軸貫通部、連接器連接針部除外) | ||
| 國際標準 | EU指令 | 低電壓指令 | EN60034-1/-5 |
| UL標準 | UL1004-1/-6 | ||
| CSA標準 | CSA C22.2 ***00(根據cUR) | ||
| 項目 | 規(guī)格 |
|---|---|
| 編碼器方式 | 光學式無電池***值編碼器 |
| 每圈分辨率 | 20位 |
| 多圈旋轉量保持 | 12位 |
| 輸出信號 | 串行通信 |
| 輸出接口 | RS485標準 |
| 型號(R88M-) 項目 單位 |
AC200V | ||||||
|---|---|---|---|---|---|---|---|
| 1AM20030T | 1AM40030T | 1AM75030T | |||||
| 額定輸出 *1 *2 | W | ||||||
| 額定扭矩 *1 *2 | N·m | ||||||
| 額定轉速 *1 *2 | r/min | ||||||
| ***大轉速 | r/min | ||||||
| 瞬時***大扭矩 *1 *3 | N·m | ||||||
| 額定電流 *1 *2 | A(rms) | ||||||
| 瞬時***大電流 *1 | A(rms) | ||||||
| 旋轉慣量 | 無制動 | × 10-4kg·m2 | |||||
| 帶制動 | × 10-4kg·m2 | ||||||
| 適用負荷慣量 | × 10-4kg·m2 | ||||||
| 扭矩常數 *1 | N·m/A(rms) | ||||||
| 功率比 *1 *5 | kW/s | ||||||
| 機械時間常數 *5 | ms | ||||||
| 電氣時間常數 | ms | ||||||
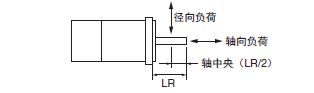
| 容許徑向負荷 *6 | N | ||||||
| 容許軸向負荷 *6 | N | ||||||
| 重量 | 無制動 | kg | |||||
| 帶制動 | kg | ||||||
| 散熱板尺寸(材質) | mm | ||||||
| 制動器 規(guī)格 *7 | 勵磁電壓 *8 | V | |||||
| 消耗電流(20℃時) | A | ||||||
| 靜摩擦扭矩 | N·m | ||||||
| 吸引時間 | ms | ||||||
| 釋放時間 *9 | ms | ||||||
| 齒隙 | º | ||||||
| 容許制動做功 | J | ||||||
| 容許總做功 | J | ||||||
| 容許角加速度 | rad/s2 | ||||||
| 制動器壽命(加減速) | - | ||||||
| 制動壽命 (ON/OFF)、 B10d | - | ||||||
| 絕緣等級 | - | ||||||
| 型號(R88M-) 項目 單位 |
1AM20030T-O/-OS2/-BO/-BOS2 | 1AM40030T-O/-OS2/-BO/-BOS2 | 1AM75030T-O/-OS2/-BO/-BOS2 | |
|---|---|---|---|---|
| 型號(R88M-) 項目 單位 |
AC200V | |||||||
|---|---|---|---|---|---|---|---|---|
| 1AL1K030T | 1AL1K530T | 1AL2K030T | 1AL2K630T | |||||
| 額定輸出 *1 *2 | W | |||||||
| 額定扭矩 *1 *2 | N·m | |||||||
| 額定轉速 *1 *2 | r/min | |||||||
| ***大轉速 | r/min | |||||||
| 瞬時***大扭矩 *1 *3 | N·m | |||||||
| 額定電流 *1 *2 | A(rms) | |||||||
| 瞬時***大電流 *1 | A(rms) | |||||||
| 旋轉慣量 | 無制動 | × 10-4kg·m2 | ||||||
| 帶制動 | × 10-4kg·m2 | |||||||
| 適用負荷慣量 | × 10-4kg·m2 | |||||||
| 扭矩常數 *1 | N·m/A(rms) | |||||||
| 功率比 *1 *5 | kW/s | |||||||
| 機械時間常數 *5 | ms | |||||||
| 電氣時間常數 | ms | |||||||
| 容許徑向負荷 *6 | N | |||||||
| 容許軸向負荷 *6 | N | |||||||
| 重量 | 無制動 | kg | ||||||
| 帶制動 | kg | |||||||
| 散熱板尺寸(材質) | mm | |||||||
| 制動器 規(guī)格 *7 | 勵磁電壓 *8 | V | ||||||
| 消耗電流(20℃時) | A | |||||||
| 靜摩擦扭矩 | N·m | |||||||
| 吸引時間 | ms | |||||||
| 釋放時間 *9 | ms | |||||||
| 齒隙 | º | |||||||
| 容許制動做功 | J | |||||||
| 容許總做功 | J | |||||||
| 容許角加速度 | rad/s2 | |||||||
| 制動器壽命(加減速) | - | |||||||
| 制動壽命 (ON/OFF)、 B10d | - | |||||||
| 絕緣等級 | - | |||||||
| 型號(R88M-) 項目 單位 |
AC400V | ||||||
|---|---|---|---|---|---|---|---|
| 1AL75030C | 1AL1K030C | 1AL1K530C | |||||
| 額定輸出 *1 *2 | W | ||||||
| 額定扭矩 *1 *2 | N·m | ||||||
| 額定轉速 *1 *2 | r/min | ||||||
| ***大轉速 | r/min | ||||||
| 瞬時***大扭矩 *1 *3 | N·m | ||||||
| 額定電流 *1 *2 | A(rms) | ||||||
| 瞬時***大電流 *1 | A(rms) | ||||||
| 旋轉慣量 | 無制動 | × 10-4kg·m2 | |||||
| 帶制動 | × 10-4kg·m2 | ||||||
| 適用負荷慣量 | × 10-4kg·m2 | ||||||
| 扭矩常數 *1 | N·m/A(rms) | ||||||
| 功率比 *1 *5 | kW/s | ||||||
| 機械時間常數 *5 | ms | ||||||
| 電氣時間常數 | ms | ||||||
| 容許徑向負荷 *6 | N | ||||||
| 容許軸向負荷 *6 | N | ||||||
| 重量 | 無制動 | kg | |||||
| 帶制動 | kg | ||||||
| 散熱板尺寸(材質) | mm | ||||||
| 制動器 規(guī)格 *7 | 勵磁電壓 *8 | V | |||||
| 消耗電流(20℃時) | A | ||||||
| 靜摩擦扭矩 | N·m | ||||||
| 吸引時間 | ms | ||||||
| 釋放時間 *9 | ms | ||||||
| 齒隙 | º | ||||||
| 容許制動做功 | J | ||||||
| 容許總做功 | J | ||||||
| 容許角加速度 | rad/s2 | ||||||
| 制動器壽命(加減速) | - | ||||||
| 制動壽命 (ON/OFF)、 B10d | - | ||||||
| 絕緣等級 | - | ||||||
| 型號(R88M-) 項目 單位 |
AC400V | |||||
|---|---|---|---|---|---|---|
| 1AL2K030C | 1AL3K030C | |||||
| 額定輸出 *1 *2 | W | |||||
| 額定扭矩 *1 *2 | N·m | |||||
| 額定轉速 *1 *2 | r/min | |||||
| ***大轉速 | r/min | |||||
| 瞬時***大扭矩 *1 *3 | N·m | |||||
| 額定電流 *1 *2 | A(rms) | |||||
| 瞬時***大電流 *1 | A(rms) | |||||
| 旋轉慣量 | 無制動 | × 10-4kg·m2 | ||||
| 帶制動 | × 10-4kg·m2 | |||||
| 適用負荷慣量 | × 10-4kg·m2 | |||||
| 扭矩常數 *1 | N·m/A(rms) | |||||
| 功率比 *1 *5 | kW/s | |||||
| 機械時間常數 *5 | ms | |||||
| 電氣時間常數 | ms | |||||
| 容許徑向負荷 *6 | N | |||||
| 容許軸向負荷 *6 | N | |||||
| 重量 | 無制動 | kg | ||||
| 帶制動 | kg | |||||
| 散熱板尺寸(材質) | mm | |||||
| 制動器 規(guī)格 *7 | 勵磁電壓 *8 | V | ||||
| 消耗電流(20℃時) | A | |||||
| 靜摩擦扭矩 | N·m | |||||
| 吸引時間 | ms | |||||
| 釋放時間 *9 | ms | |||||
| 齒隙 | º | |||||
| 容許制動做功 | J | |||||
| 容許總做功 | J | |||||
| 容許角加速度 | rad/s2 | |||||
| 制動器壽命(加減速) | - | |||||
| 制動壽命 (ON/OFF)、 B10d | - | |||||
| 絕緣等級 | - | |||||
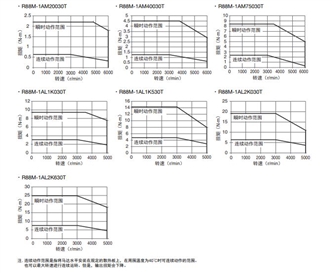
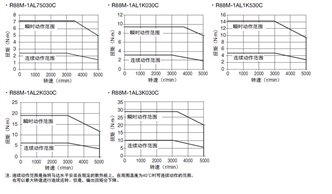
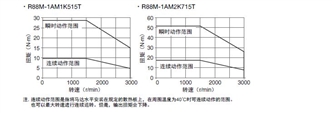
該圖表示配置3m標準電纜、三相AC200V輸入或單相AC220V輸入時的特性。
該圖表示配置3m標準電纜、三相AC400V輸入時的特性。
| 型號(R88M-) | AC200V | |||||
|---|---|---|---|---|---|---|
| 項目 單位 | 1AM1K515T | 1AM2K715T | ||||
| 額定輸出 *1 *2 | W | |||||
| 額定扭矩 *1 *2 | N·m | |||||
| 額定轉速 *1 *2 | r/min | |||||
| ***大轉速 | r/min | |||||
| 瞬時***大扭矩 *1 | N·m | |||||
| 額定電流 *1 *2 | A(rms) | |||||
| 瞬時***大電流 *1 | A(rms) | |||||
| 旋轉慣量 | 無制動 | × 10-4kg·m2 | ||||
| 帶制動 | × 10-4kg·m2 | |||||
| 適用負荷慣量 | × 10-4kg·m2 | |||||
| 扭矩常數 *1 | N·m/A(rms) | |||||
| 功率比 *1 *3 | kW/s | |||||
| 機械時間常數 *3 | ms | |||||
| 電氣時間常數 | ms | |||||
| 容許徑向負荷 *4 | N | |||||
| 容許軸向負荷 *4 | N | |||||
| 重量 | 無制動 | kg | ||||
| 帶制動 | kg | |||||
| 散熱板尺寸(材質) | mm | |||||
| 制動器 規(guī)格 *5 |
勵磁電壓 *6 | V | ||||
| 消耗電流(20℃時) | A | |||||
| 靜摩擦扭矩 | N·m | |||||
| 吸引時間 | ms | |||||
| 釋放時間 *7 | ms | |||||
| 齒隙 | º | |||||
| 容許制動做功 | J | |||||
| 容許總做功 | J | |||||
| 容許角加速度 | rad/s2 | |||||
| 制動器壽命(加減速) | - | |||||
| 制動壽命 (ON/OFF)、 B10d | - | |||||
| 絕緣等級 | - | |||||
| 型號(R88M-) | AC400V | |||||
|---|---|---|---|---|---|---|
| 項目 單位 | 1AM1K515C | 1AM3K015C | ||||
| 額定輸出 *1 *2 | W | |||||
| 額定扭矩 *1 *2 | N·m | |||||
| 額定轉速 *1 *2 | r/min | |||||
| ***大轉速 | r/min | |||||
| 瞬時***大扭矩 *1 | N·m | |||||
| 額定電流 *1 *2 | A(rms) | |||||
| 瞬時***大電流 *1 | A(rms) | |||||
| 旋轉慣量 | 無制動 | × 10-4kg·m2 | ||||
| 帶制動 | × 10-4kg·m2 | |||||
| 適用負荷慣量 | × 10-4kg·m2 | |||||
| 扭矩常數 *1 | N·m/A(rms) | |||||
| 功率比 *1 *3 | kW/s | |||||
| 機械時間常數 *3 | ms | |||||
| 電氣時間常數 | ms | |||||
| 容許徑向負荷 *4 | N | |||||
| 容許軸向負荷 *4 | N | |||||
| 重量 | 無制動 | kg | ||||
| 帶制動 | kg | |||||
| 散熱板尺寸(材質) | mm | |||||
| 制動器 規(guī)格 *5 | 勵磁電壓 *6 | V | ||||
| 消耗電流(20℃時) | A | |||||
| 靜摩擦扭矩 | N·m | |||||
| 吸引時間 | ms | |||||
| 釋放時間 *7 | ms | |||||
| 齒隙 | º | |||||
| 容許制動做功 | J | |||||
| 容許總做功 | J | |||||
| 容許角加速度 | rad/s2 | |||||
| 制動器壽命(加減速) | - | |||||
| 制動壽命 (ON/OFF)、 B10d | - | |||||
| 絕緣等級 | - | |||||

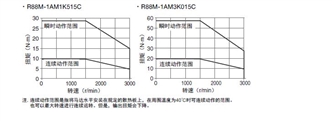
注. 連續(xù)動作范圍是指將馬達水平安裝在規(guī)定的散熱板上,在周圍溫度為40℃時可連續(xù)動作的范圍。
也可以***大轉速進行連續(xù)運轉。但是,輸出扭矩會下降。
該圖表示配置3m標準電纜、三相400V輸入時的特性。
品類齊全
省心省力,一站購齊
一對一客服
選型詢價,快速響應
貨期保障
多倉直發(fā),貨期無憂
正品貨源
正品保障,誠信服務